机器学习在滴滴网络定位中的探索和实践
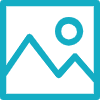
定位是所有LBS服务的基础服务。在滴滴的业务场景下,定位主要是指各类终端设备的位置,包括手机、单车、行车记录仪、车机端等。作为底层服务,在滴滴日均提供700亿次定位服务,支撑着平台的各类业务。
今天给大家分享的是机器学习在滴滴网络定位中的实践工作,会重点介绍三阶段的演进:无监督模型、有监督回归模型、端到端CNN模型。
1. 什么是网络定位
目前定位技术主要包括GPS、网络定位、惯性航位推算、MM(地图匹配)、视觉定位等。GPS是最为人熟知的定位技术,是依靠设备与卫星交互来获取经纬度的方式。GPS精度高,但有冷启动耗时长、耗电大、遮挡场景不可用等缺点。在滴滴场景下,乘客和司机在有遮挡的场景下,例如室内、高架下等,GPS通常处于不可用状态。这时就需要有其他定位技术作为GPS的补充,使得乘客发单、司机导航等服务依然可用。其中最主要的补充便是网络定位。
室内类场景虽然有遮挡,但设备通常可以扫描到Cell(基站)和Wifi列表,而且Cell和Wifi设备位置相对稳定,连接其上的设备可以借其定位,这就产生了网络定位。网络定位包括wifi定位和基站定位,是指基于终端扫描到的wifi或基站列表进行的定位技术。Wifi的接入设备通常称为AP(Acess Point),方便起见,下文将AP和基站统称为AP。
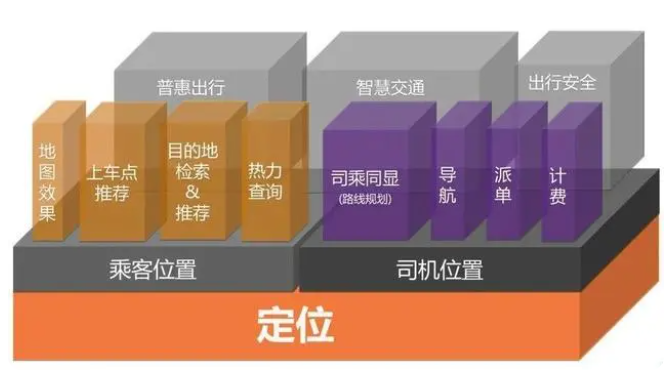
网络定位通常采用的是指纹定位技术,是一个根据query匹配指纹库信息,并计算得到坐标位置的过程。如下图所示,网络定位系统主要包括离线建库和在线定位两个阶段。
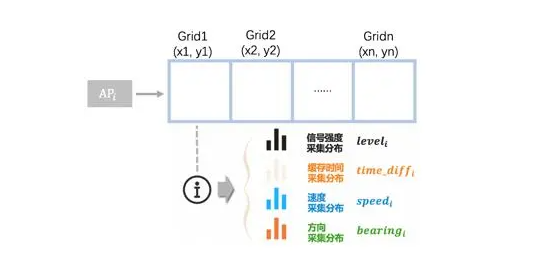
离线建库主要是基于有GPS时的采集数据,建指纹库的过程。指纹库中记录AP的各类信息在不同地理网格内的采集数据分布,如下图所示。
在线阶段,根据线上query匹配指纹库信息,并计算得到坐标位置。
本文介绍的主要是在线定位部分,即query匹配指纹库、计算坐标位置。
2. 网络定位匹配算法迭代
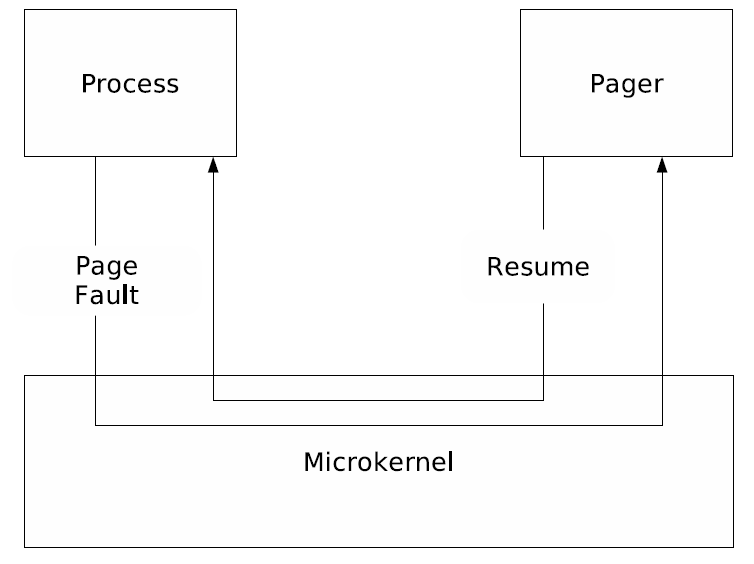
在线定位算法共经历了无监督概率模型、有监督回归模型、端到端CNN模型三次大的迭代。前两个阶段的网络定位主要包括网格召回、网格排序、网格平滑三步,如下图图一所示。端到端CNN模型去除了网格排序和网格平滑,基于一个召回中心点,直接回归位置坐标,如下图图二所示。

图一
图二
▍2.1 无监督概率模型
网络定位要完成在线AP与离线AP指纹库的匹配,是联合概率计算的过程。以AP指纹库的信号强度分布为例,看下网格概率计算过程。
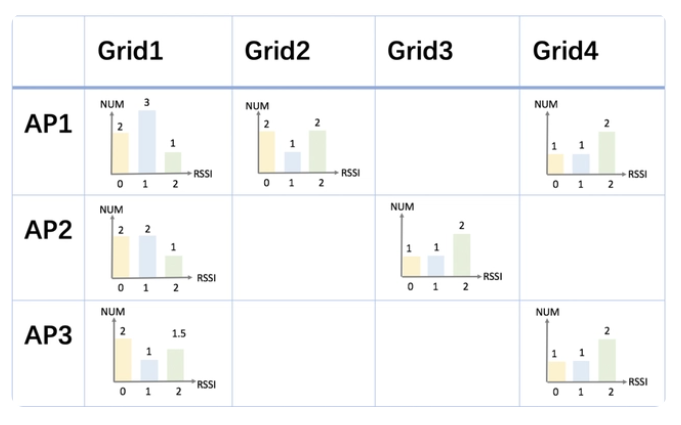
纵轴为采集数据中的AP编号,横轴为空间网格编码,相交点表示每个AP在对应网格中的采集信号强度分布。空值表示AP在对应的位置无采集数据。
以一个实时定位query信息:(AP1:RSSI=1,AP3:RSSI=0)为例,介绍网格召回、排序、平滑的过程。
召回阶段,基于扫描到的AP1和AP3,可以召回Grid1、Grid2、Grid4;
排序阶段,结合离线AP库,基于独立性假设和贝叶斯公式,计算各网格的权重:
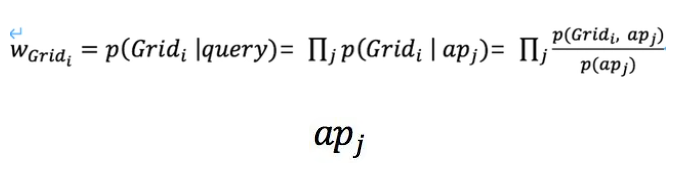
表示观测到的APj的信息。以信号强度RSSI单一特征为例,上例中,

网格平滑阶段,基于上述的统计概率,排序获取TopK个网格,采用爬山法求解最优坐标:
其中,
为预测位置到
的距离。
▍2.2 有监督回归模型
无监督概率模型的方法,思路清晰易懂,易实现,是早期网络定位的主要方式。但有以下问题:
联合概率的方式对采集信息不充分的位置不友好,例如上例
难以拟合多维特征,尾部badcase较严重
技术目标无法得到直接优化,天花板较低
出于对以上问题的思考,整体流程仍保持网格召回、排序、平滑三阶段,我们将网格排序升级为有监督回归模型,通过引入多元特征和显示的优化目标,实现对网格的更精准打分。
Label:待预测网格与真实位置的位置偏差,回归任务。
特征工程:构建近百维特征,主要包含AP特征,网格特征,前文信息等。
模型选择:一期上线GBDT模型;二期对比了GBDT、FM、DeepFM、FM+GBDT等,最终线上最优融合模型结构如下。
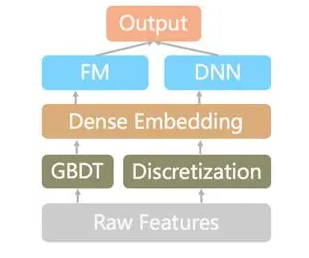
原始特征中的稠密特征和低维稀疏特征经过GBDT进行特征组合、交叉;GBDT输出的叶子节点编号与高维稀疏特征经过DeepFM网络,最终输出网格与真值的位置偏差。
TopK网格平滑:预测偏差距离从小到大排序,截取TopK网格;爬山法,梯度下降求解最优坐标。
▍2.3 端到端CNN模型
有监督模型在特征利用、模型结构、优化目标等方面提供了更大的操作空间,可以极大地打开天花板。上线后定位精度等指标取得了显著的收益。
但该方法仍有以下问题:
每个网格孤立刻画,信息采集时的不均衡、有偏的问题无法有效解决
TopK平滑层与排序层割裂,无法联合优化,且引入部分人工超参
对于以上问题,考虑以下解决方案:
CNN网络:充分利用空间信息的局部相关性,增强特征的提取能力
端到端网络:合并排序与平滑层,改为直接回归位置坐标,目标更统一,减少人工超参
最终,整体网络结构如下:
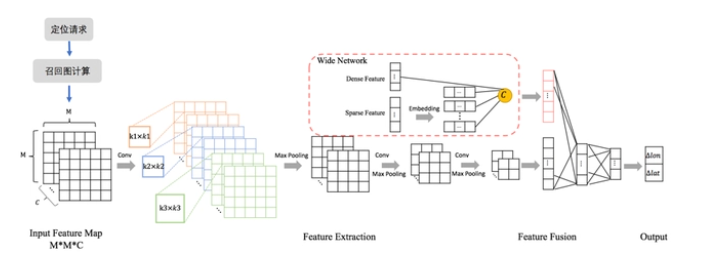
下面以基站定位为例,介绍该结构的实现细节。
首先介绍下输入特征的构建:
Wide网络特征:表达Query信息的Wide特征共十几维
CNN特征图的构建:
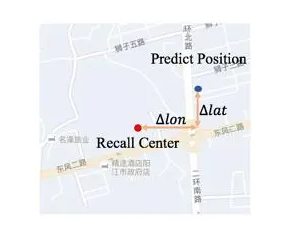
召回中心:采集热度较高的TopN网格的经纬度中位数作为图的中心点。
特征图构建:选取C维图特征,每一维特征为一个channel;基于召回中心,构建M*M分辨率的特征图。

CNN特征类别
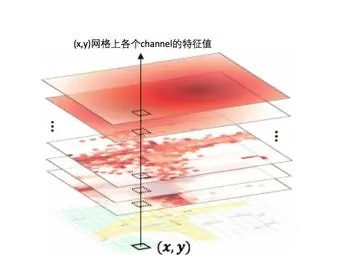
网格上各个channel的特征计算
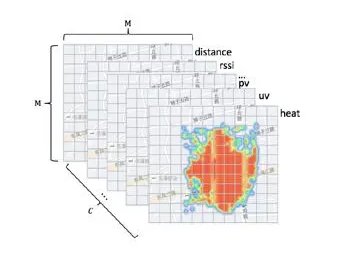
输入特征图的示例
网络结构:在CNN网络部分,采用多尺度卷积核提取特征后,经过两个卷积+池化层后,将特征图打平。Wide部分稀疏特征经过embedding后,与稠密特征级联。两部分tensor级联后经过全连接层,最终输出与召回中心点的位置偏差。
Label与Loss:label为真实位置与召回中心位置的偏移dx和dy,召回中心点+预测偏移即得预测位置。loss最初使用的是经纬度的L2 loss:

考虑到经纬度在球面上表达距离的差异,我们改为了使用球面距离偏差作为label,也获得了稳定的收益:
,dx和dy表示真实空间距离
CNN模型在线上AB实验取得了显著的收益,已全量上线。CNN端到端模型升级了信息的表达方式,由单网格、结构化的信息表达改为了Image的表达方式,配合cnn网络结构,获取了效果的显著提升;并且将几十甚至几百个网格的预测问题改为了单次位置回归问题,虽然模型复杂度有所增加,但整体性能基本持平。
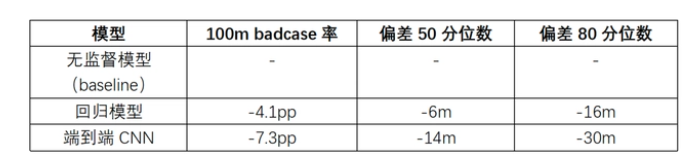
▍2.4 线上效果
网络定位三阶段的模型先后上线进行了AB对比实验。以基站定位三个主要技术指标为例,对比结果如下表所示:
3. 总结与展望
本文总结了定位策略团队在网络定位算法侧的工作,介绍了无监督概率模型、有监督回归模型、端到端CNN的演进及其中的思考。
无GPS时的定位仍面临着很多困难,未来我们将在以下方面持续探索:
模型效果优化:
目前CNN模型在基础信息利用、召回等方面仍有较大优化空间。
性能问题:
考虑线上性能,在基础信息和网络结构上做了很多删减。期望通过更优的召回策略、蒸馏剪枝等平衡效果与性能。
5G技术:
5G的天然优势(高频率、高密度、低延时)也必定会带来定位精度的显著提升,相关调研工作正在进行。
复杂场景定位:
对于室内、地下停车场等典型复杂场景,网络定位面临着真值获取难、移动ap等难点。细分场景也逐渐向模型化方向演进。