既生瑜,何生亮,究竟何为PPP-RTK?
引言:提到智能驾驶,就离不开它必要功能需求——高精度定位,其中实时动态定位RTK(Real-Time Kinematic)是高精度卫星导航定位中应用最为广泛、最具代表性的技术,身为北斗国家队的千寻位置,基于RTK技术承建和运营了地基增强系统“全国一张网”,颇受广大海内外用户好评。然而近来,PPP-RTK的概念甚嚣尘上,听说其表现颇为亮眼,业内人士免不了要将RTK与PPP-RTK进行一番比较,既已有了便宜大碗的RTK,为何还要打造出一个PPP-RTK?想解开这个既生瑜何生亮的问题,让我们从GNSS高精定位发展史讲起…
GNSS高精度定位最早用于军事用途,后来逐渐开放民用,最早主要用于导航,精度较低,从几米到几十米不等,主要是采用“标准单点定位”技术,专业术语SPP(Single Point Positioning)。这样的定位误差太大显然满足不了测绘和航空等领域的应用,那么是什么因素导致了定位误差这么大呢?经过一波波科学家的不断研究,发现影响高精度定位的因素主要分为三类:卫星相关误差,信号传播路径相关误差,卫星信号接收器相关误差,见下图。
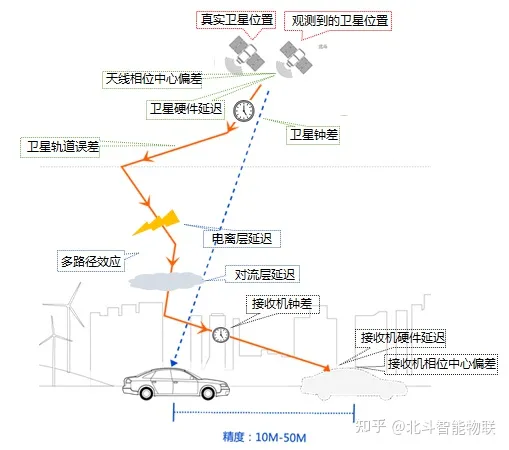
卫星相关的误差对于全球用户的影响都一样,卫星信号传播路径相关误差影响特定区域,卫星信号接收器相关误差只影响此接收器。那么如何消除或减弱这些影响高精度定位的误差呢?随着技术的发展,逐渐形成两条不同的技术路线:差分方法(RTK技术)和非差方法(PPP技术)。
差分方法对待误差的方式简单粗暴,简而言之就是能不处理就不处理,举个例子:对于卫星原子钟误差来说,如果两台接收器同时接收同一颗卫星信号,那么这个误差对于这两台接收器影响是一样的,是不是在观测的信号量之间做个减法就消除了呢?
确实如此,专业术语叫”站间单差“。同理,同一台接收器在同一时刻接收两颗卫星的信号是不是接收器钟误差也是一样的,所以在两颗卫星信号观测量之间做一次减法就可以消除掉,专业术语叫“星间单差”。对于其他误差采用同样的原理。经过两次减法已经消除了大部分影响高精度定位的误差,专业术语叫“站间星间双差”,从而可以获得2-5厘米精度的相对位置,这就是我们熟悉的RTK技术原理,如下图所示:
RTK技术经过几十年的发展,从最初的单站到网络RTK到全国一张网,在千寻位置的带领下已经让RTK在广袤的祖国大地变得随时随地可用。网络RTK技术原理本质类似,在此不再赘述。言归正传,回到PPP技术,PPP技术选择了和RTK技术截然不同的方向,死磕各种误差,在服务端分别计算出各种误差量大小,最终用户在进行单点定位的时候从服务端获取误差修正量从而获取高精度的位置。近年来从最初的PPP技术,到PPP-AR,到现在的PPP-RTK,不管是定位精度还是初始化时间都取得了很大的突破,让商业化应用成为可能。PPP/PPP-AR/PPP-RTK有啥区别?参考下表:
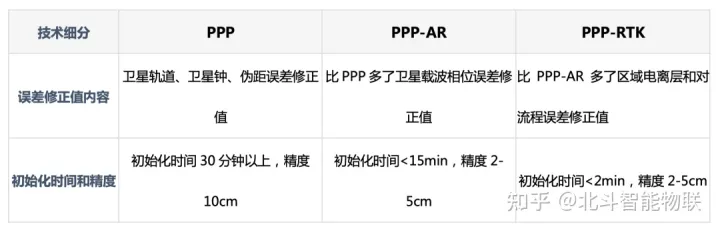
看到这里,有人会问,没看出来PPP-RTK比RTK牛在哪里?别急,下面一张表给你整的明明白白的,一表在手,可以打败99%的吃瓜群众。
PPP-RTK和RTK对比

重点来了,PPP-RTK技术优势总结下来主要有以下几点:1)基站可稀疏,可密集;2)不受单个基站问题影响;3)改正数丢失,精度保持更持久。
虽然PPP-RTK有这么多优势,但千寻的RTK服务已经覆盖了全国大部分区域,为什么还需要PPP-RTK呢?
这里就不得不说PPP-RTK另外两项重量级特性“完好性”和“功能安全”。由于PPP-RTK的技术特性使得可以对各类改正数进行独立的完好性监控,从而较容易实现完好性和功能安全,可以满足L3及以上级别的自动驾驶需求(这里必须科普一下,L3及以上级别自动驾驶车辆要求必须必备完好性和功能安全),所以PPP-RTK天生就适合高级别自动驾驶。关于什么是“完好性”和”功能安全“,以及,自动驾驶行业是怎样要求“必须必备完好性和功能安全”的,后续的科普文章会详细说明,记得锁定我们《智能驾驶发展的前世今生》专题哦~
来源: 既生瑜,何生亮,究竟何为PPP-RTK?