GNSS卫星定位的频点有哪些?
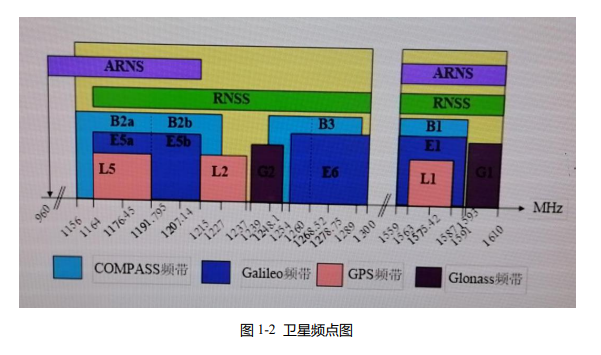
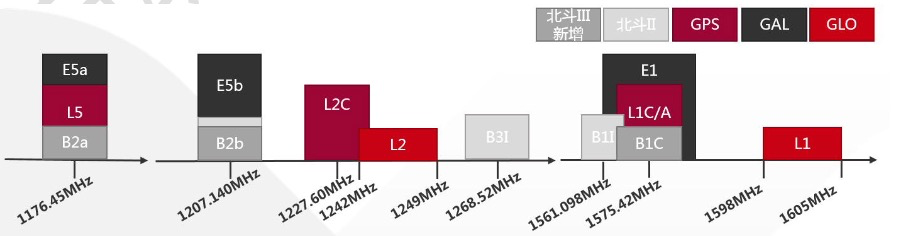
相比北斗二号,北斗三号新增 B1C、B2a 两个频点,并将 B2I 改 为 B2b 频点,北斗三号系统可以同时向外发送 B1I、B1C、B2a、B2b、 B3I 共五个频点的信号。相较 GPS 系统的双频点,更多的民用定位频 点为北斗带来了更大的应用优势。GNSS 系统频点示意图如图所示:
首先根据频点示意图可以看出,北斗三号新增频点 B1c 和 B2a,与 GPS 的 L1/L5 相同,以及和 Galileo 的 E1/E5 中心频率相同,这三大 全球卫星导航系统拥有共同可用的频点,这将为研发基于该频点的高 可靠、高性能、低功耗、低成本的可互操作的双频车载定位终端带来了可 能,双频定位终端成本将进一步降低,将进一步促进车载终端向双频 定位模组+双频天线方向发展。双频卫星定位在不适用任何改正服务 的情况下,可以达到亚米级的定位精度。
其次北斗三号卫星的多频点可以能够进一步提升卫星抗干扰能 力,降低卫星信号受到遮挡、多路径干扰时对定位精度的影响。更多 的频点也能够更好的保证卫星信号的连续性,对于 RTK 技术来说连 续不断的卫星信号能够保证固定解的持续输出,从而达到提升固定 率,降低收敛时长的目的。
对于 L3 及以上级别自动驾驶车辆,要求动态定位精度达到厘米 级,现阶段多频点+RTK 是唯一可行的技术方案。北斗三号卫星的 B1I、B1C、B2a、B3I 频点都可以用于 RTK 解算,这无疑是北斗系统 在自动驾驶领域的优势所在。
1、什么是GPS双频定位
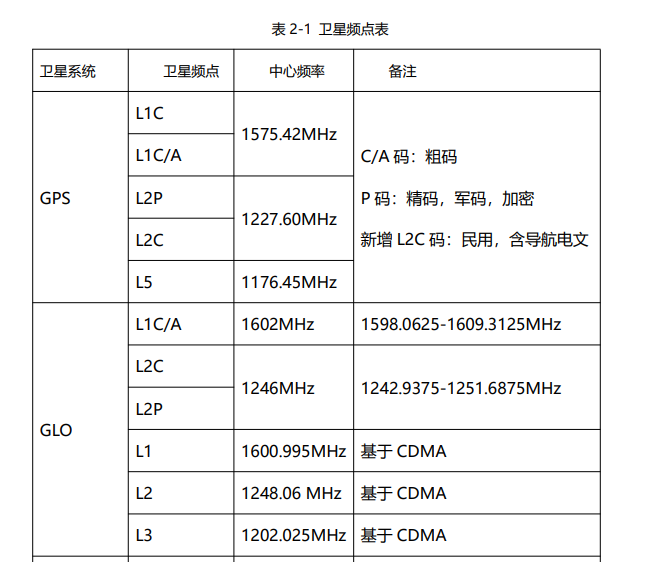
GPS信号工作频率分为了L1、L2、L5等几个波段:
L1波段:1575.42MHz±1.023MHz
L2波段:1227.60MHz±1.023MHz
L5波段:1176.45MHz±1.023MHz
以往的GPS定位均采用L1波段,是单频定位方式;目前已有GPS芯片同时使用L1+L5波段进行定位,称之为多频定位技术。
注意,还有个(GNSS)双星定位的概念,与GPS双频定位完全不是一会回事。
2、民用GPS定位发展史
1994 年,GPS 全面进入正常运行,民用信号采用 L1(频率 1575.42 MHz)单频 C/A 码,并附加选择可用性(SA)人为干扰,定位精度约为 100m,授时精度约为 340ns。
第一代民用信号利用 Block II/IIA/tIR 卫星发射,是在 L1 载波上发射的单频 C/A 码。L1波段范围为1575.42MHz±1.023MHz。
第二代民用信号利用 Block IIR~M 卫星发射,它不仅包含了第一代民用信号,而且还在 L2 载波上增加了 L2C 信号。L2波段范围为1227.60MHz±1.023MHz,早期为军事专用。
第三代民用信号利用 Block IIF 卫星发射, 它在第二代民用信号的基础上, 增加了 L5 载波,用于发射 L5 民用信号。 L5波段范围为1176.45MHz±1.023MHz。
第四代民用信号利用 Block III 卫星发射,它是在第三代民用信号的基础上,对 L1 载波中的民用信号进行了改进,用新的 L1C 代替了 L1 上原有的民用信号。
3、GPS双频定位对精度的提升
高码率可以有效提高精度
L1 的码率低,每一个码占用的时间大约是十的负六次方秒。当然这些信号都是光速传播的,也就是三乘十的八次方,那么时间乘以速度光速大概是接近300米。L5 的码率是L1 的十倍,每个码占用的时间周期比L1 少10倍,变成了十的负七次方。再乘以光速就是大概30米。当然这是一颗卫星的分辨率,如果多颗卫星同时用,很多卫星的照射范围取交集,那么L1 的精度是会远远小于300米的。而L5 更准一些。
GPS定位精度是几米?城市中有很多高楼大厦,卫星信号经过这些建筑物的反射之后变得非常杂乱,与正确的直射信号交织在一起,我们叫做多径(很多条路径)。这些信号是光速传播的,即使一个小小的反射导致的一个小小的信号延迟,和光速做乘法后得到的距离也是很大的。而这些都是误差来源。
L5 信号码率高,频谱密度更容易集中。虽然L5 也会反射,不过反射之后的错误信号和正确的直射信号叠加形成新的频谱密度高峰的概率会比较低,这样也使得计算引擎更容易找到直射卫星信号。
L5 高码率这么好用,为什么不直接用L5呢?这是因为L1 的低码率更容易被捕获,我们要精度的同时也不能牺牲定位时间。所以L1 也叫做粗略捕获码,待捕获到信号之后,L5 就可以一起参与计算了。
两个频率可以消除电离层误差
如果只有L1 信号,那手机接收到之后就当L1 是直射过来的了。而实际上L1 可能已经在大气层发生了折射,而折射会导致一定的延时,大气层的这点延迟会导致很大的误差,很多科学家认定大气层误差占到所有误差的60% 权重。
不同频率的信号通过相同介质的折射率不同。L5 天生和L1 不同频率。卫星同时发射了两个频率的信号,而手机接收到的时间却不一样,这样就给了手机一个推算大气层误差的机会,进而去消除。
GPS双频只能对消电离层误差,多径误差无法消除(虽然L5信号的多径有改善),NLOS(非直达信号)无法消除。然而后两者才是城市环境中手机定位中的最主要误差来源。
一、频点+卫星
1、各大系统的常用信号频率
GPS
系统频段名 band 频率/MHZ 波长/cm
L1 1 1575.42 19.04
L2 2 1227.60 24.44
L5 5 1176.45 25.50
UPD估计中的NL、WL频率组合、组合波长情况
项目 频率组合 组合波长/cm
NL_1 L1 19.04
WL_12 L1 – L2 86.25
EWL_25 L2 – L5 498.75
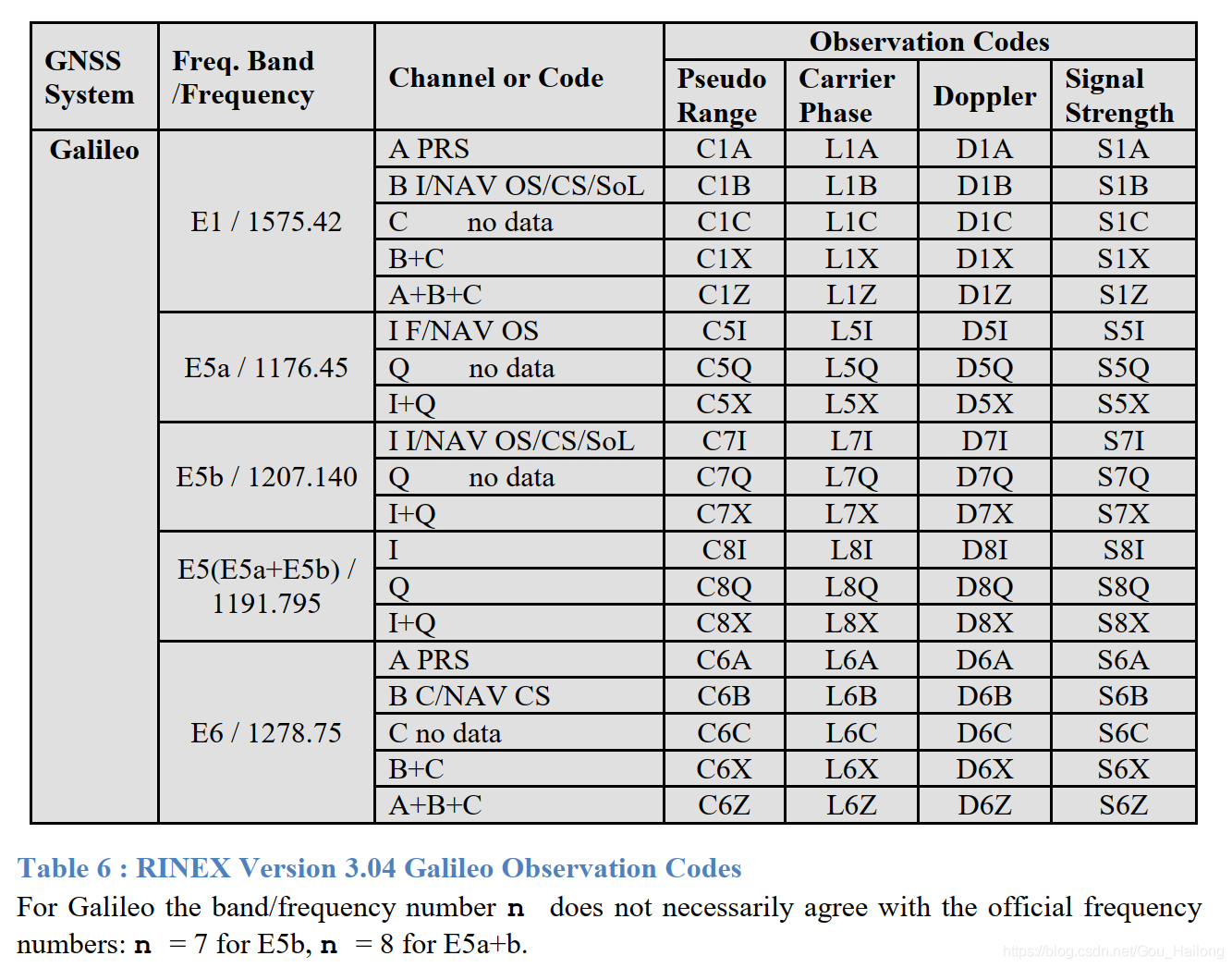
Galileo
系统频段名 band 频率/MHZ 波长/cm
E1 1 1575.42 19.04
E5a 5 1176.45 25.50
E5b 7 1207.14 24.85
E5(E5a+E5b) 8 1191.795 25.17
E6 6 1278.75 23.46
UPD估计中的NL、WL频率组合、组合波长情况
项目 频率组合 组合波长/cm
NL_1 E1 19.04
WL_15 E1 – E5a 75.19
EWL_57 E5b – E5a 977.52
EWL24_58 E5 – E5a 1955.03
EWL25_56 E6 – E5 293.26
BDS
BDS-2播发信号B1I、B2I、B3I;BDS-3除了播发B1I、B3I,还播发B1C、B2a、B2b、B2a+b
系统频段名 频率/MHZ band 波长/cm
B1I 1561.098 2 19.22
B2I 1207.14 7 24.85
B3I 1268.52 6 23.65
B1C 1575.42 1 19.04
B2a 1176.45 5 25.50
B2b 1207.14 9 24.85
B2a + b 1191.795 8 25.17
BDS2 – UPD估计中的NL、WL频率组合、组合波长情况
项目 频率组合 组合波长/cm
NL_2 B1I 19.22
WL_27 B1I – B2I 84.76
EWL_76 B3I – B2I 488.76
BDS3 – UPD估计中的NL、WL频率组合、组合波长情况
项目 频率组合 组合波长/cm
NL_2 B1I 19.22
WL_26 B1I – B3I 102.54
EWL_65 B3I – B2a 325.84
EWL24_68 B3I – B2 391.0
EWL25_69 B3I – B2b 488.76
BDS3应该是计划以B1C代替B1I,但目前为了和BDS2兼容,用的还是B1I(I guess)。
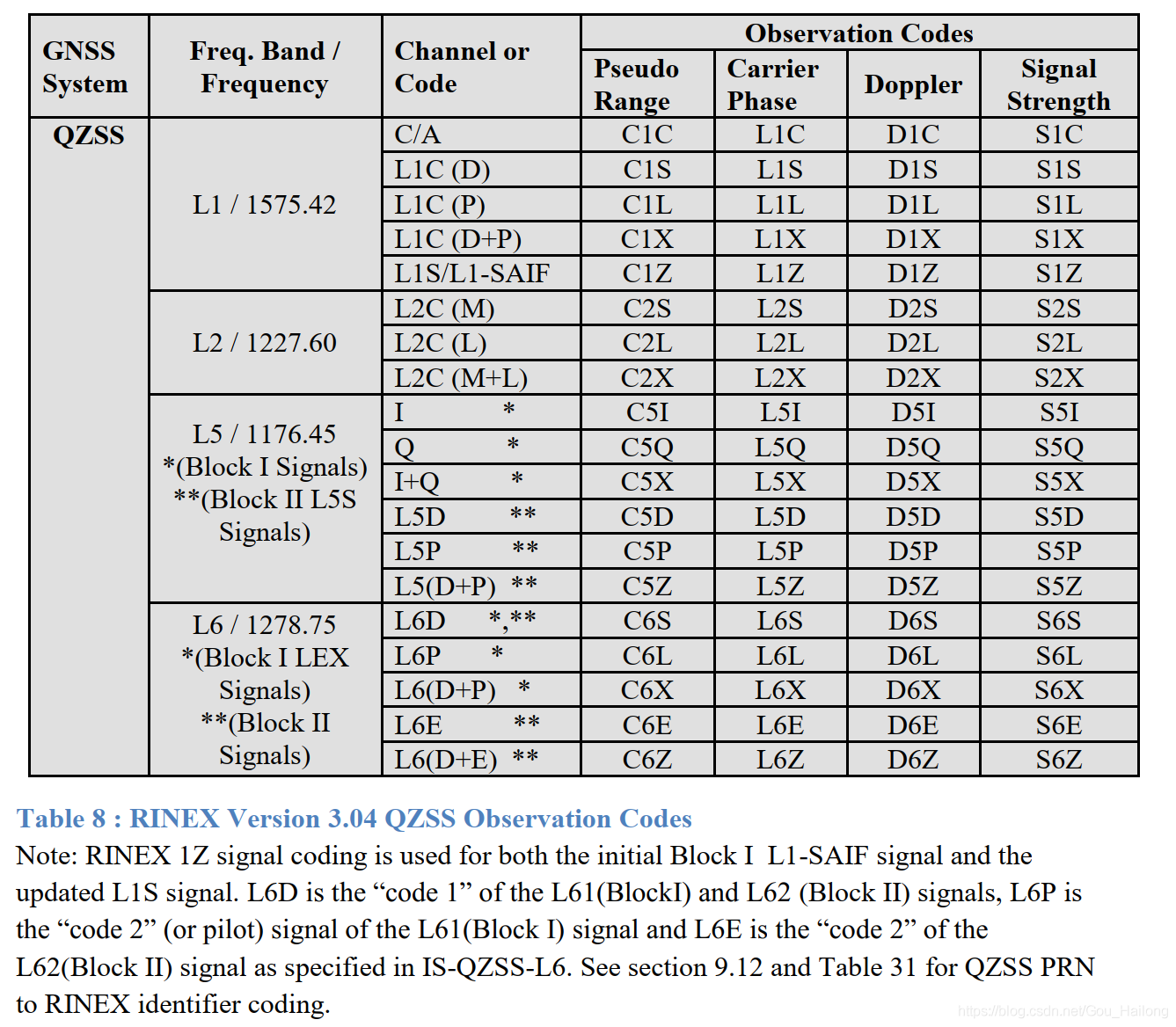
QZSS
系统频段名 band 频率/MHZ 波长/cm
L1 1 1575.42 19.04
L2 2 1227.60 24.44
L5 5 1176.45 25.5
L6 6 1278.75 23.46
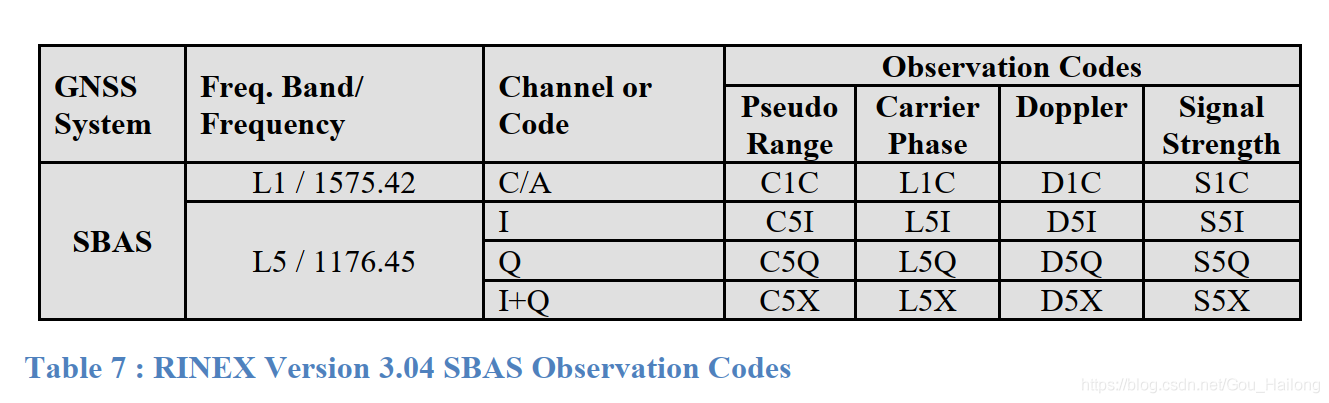
SBS
系统频段名 band 频率/MHZ 波长
L1 1 1575.42 19.04
L5 5 1176.45 25.5
注:这些应该只是中心频率的大小,每一个频段应该都有一定的宽度(带宽)。这些只是目前笔者所接触到的,用于定位的频段,也许还有其他用途的频段,这些等笔者了解到再补充。
值得注意的是:
1575.42MHZ:L1、E1、B1C…
1176.45MHZ:L5、E5a、B2a…
1270.14MHZ:E5b、B2I、B2b
1191.795MHZ:E5a+b、B2a+b
3、频点
-
GPS

-
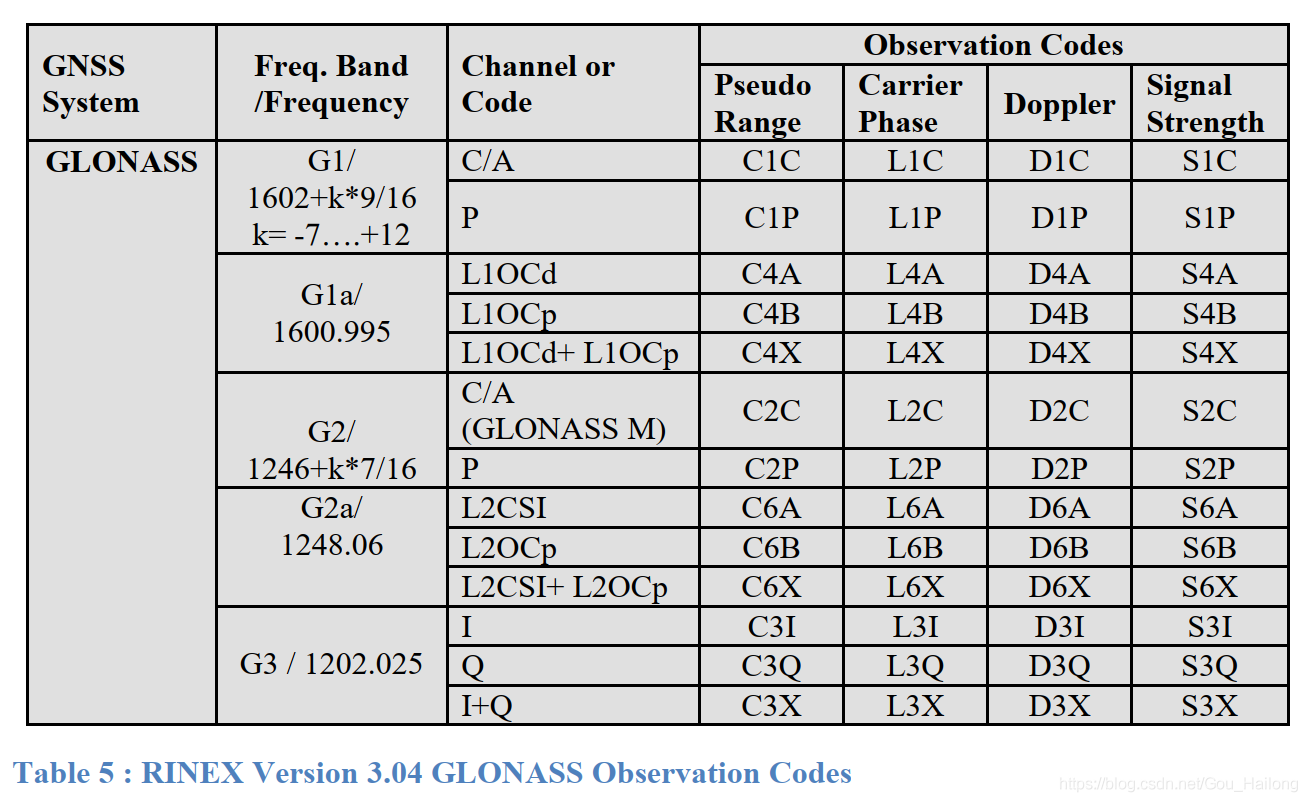
GLO
-
GAL
-
SBAS
-
QZSS
-
BDS
-
IRNSS
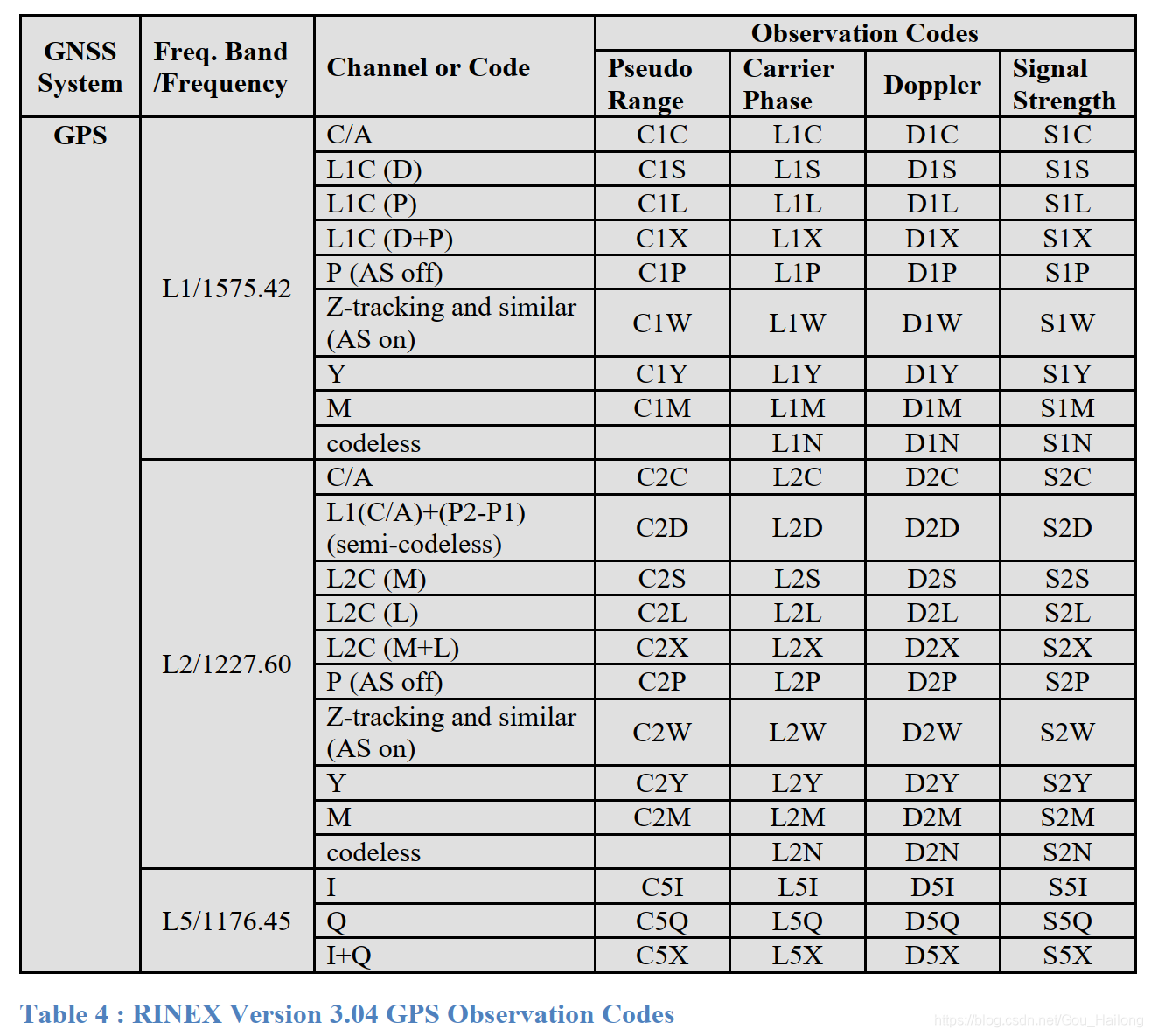
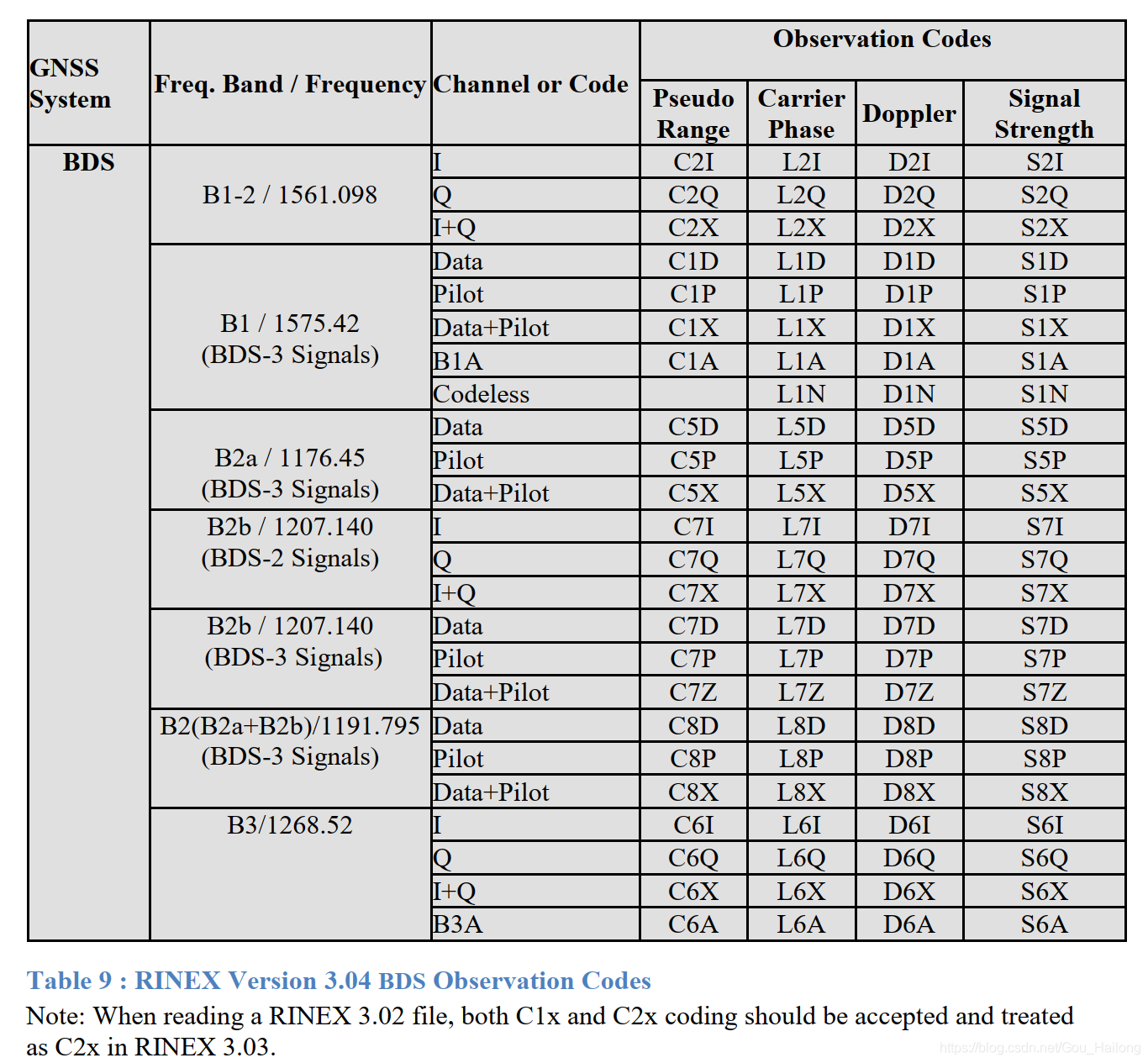
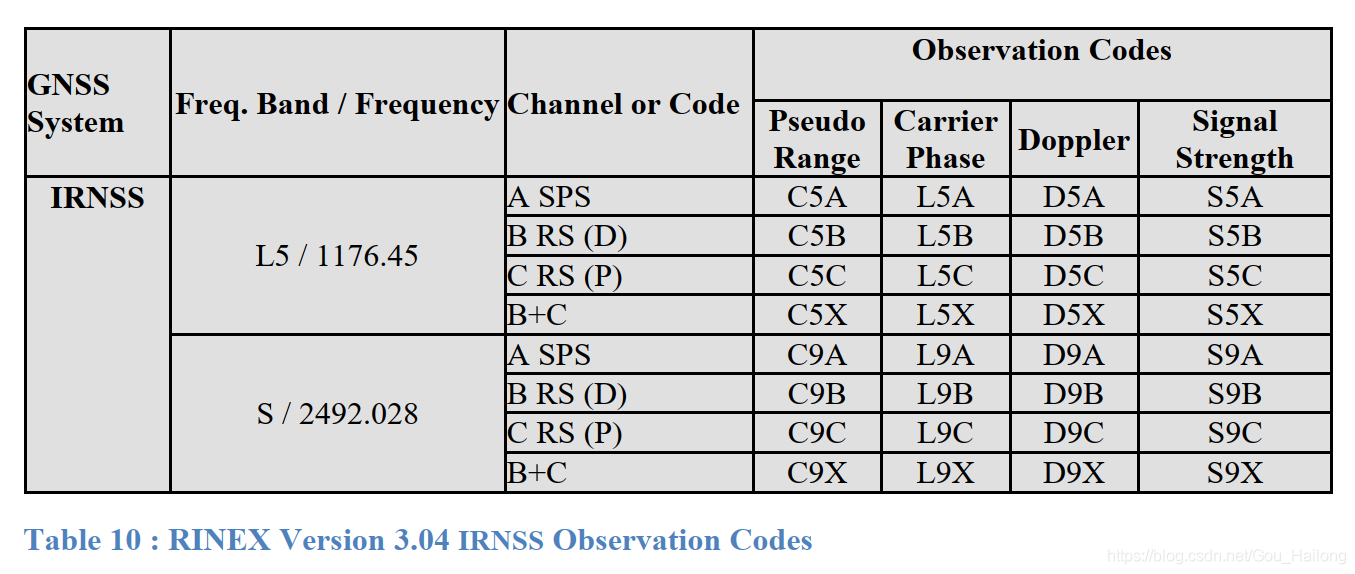
以上都来自rinex3.04文件,频点一般由三个字符表示:cnc
第一个字符的含义
字符 含义
C 伪距观测
L 载波相位观测
D 多普勒观测
S 信号强度
第二个字符含义
系统 数字
GPS 125
GAL 15786
GLO 14263
BDS 215786
SBAS 15
QZSS 1256
第三个字符表示信号通道,可参考:
GNSS信号频点综述解读
https://wenku.baidu.com/view/b90bdc4148649b6648d7c1c708a1284ac950054e.html
二、解释
1、选此波段的原因
没错,GNSS系统所播发的信号和可见光一样,属于电磁波,只不过它的频段不在人眼可视频段当中,所以,人眼看不到。电磁波在地面和卫星之间传播时,会受到电离层中自由电子和离子的吸收,以及对流层中氧分子、水蒸气等的吸收和散射,从而存在能量损耗。当信号处于0.3GHZ~10GHZ(1G=1000M)频段时,大气损耗最小,此频段称为“无线电窗口”,选择卫星通讯及导航频段时常需考虑这些“窗口”。其中L波段频率范围为1GHZ~2GHZ,S波段频率范围为2GHZ~4GHZ,C波段频率范围为4GHZ~8GHZ。三个波段中C波段频率最高,电离层延迟影响最小,但降雨损耗最严重;L波段频率最低,电离层延迟影响最大,但基本不受降雨影响。美国GPS卫星导航系统设计之初,曾论证过很多不同的频段,但是没有一个频段能够实现对所有设计准则的优化(正如人间不存在完美无瑕的人,世上本不存在十全十美的事),选择L波段是综合考虑频率的可用性,传播影响,系统设计的最佳折中方法。
2、关于雷达波段(拓展阅读)
这块参考
https://blog.csdn.net/wordwarwordwar/article/details/78297760
笔者好像有强迫症,总想搞明白一个东西为什么叫这个名字,正如一个L波段为甚么叫L波段,幸好有位前辈做了总结,这里做点摘抄。
电磁波波段的划分有两套标准,一种是旧的标准,一种是新的标准(就是这么朴素),旧的无线电波段划分为L、S、C、X、Ku、Ka、W,上述L波段就在其中。那么它为什么叫L呢?
原来,旧的命名规则起源于二战时期,最早用于搜索雷达的电磁波波长为23cm(1.3GHZ),这一波段被定义为L波段(英语Long的字头),后来这一波段的中心波长变为22cm。当波长为10cm(3GHZ)的电磁波被使用后,其波段被定义为S波段(英语Short的字头,意为比原有波长短的电磁波)。在主要使用3cm(10GHZ)电磁波的火控雷达出现后,3cm波长的电磁波被称为X波段,因为X代表座标上的某点。为了结合X波段和S波段的优点,逐渐出现了使用中心波长为5cm(6GHZ)的雷达,该波段被称为C波段(C即Compromise,英语“结合”一词的字头)。
在英国人之后,德国人也开始独立开发自己的雷达,他们选择1.5cm(20GHZ)作为自己雷达的中心波长。这一波长的电磁波就被称为K波段(K = Kurtz,德语中“短”的字头)。“不幸”的是,德国人以其日尔曼民族特有的“精确性”选择的波长可以被水蒸气强烈吸收。结果这一波段的雷达不能在雨中和有雾的天气使用。战后设计的雷达为了避免这一吸收峰,通常使用比K波段波长略长(Ka,即英语K-above的缩写,意为在K波段之上)和略短(Ku,即英语K-under的缩写,意为在K波段之下)的波段。最后,由于最早的雷达使用的是米波,这一波段被称为P波段(P为Previous的缩写,即英语“以往”的字头)。
现列表如下:
波段名 频率范围
L band 1 to 2 GHz
S band 2 to 4 GHz
C band 4 to 8 GHz
X band 8 to 12 GHz
Ku band 12 to 18 GHz
K band 18 to 26.5 GHz
Ka band 26.5 to 40 GHz
Q band 30 to 50 GHz
U band 40 to 60 GHz
V band 50 to 75 GHz
E band 60 to 90 GHz
W band 75 to 110 GHz
F band 90 to 140 GHz
D band 110 to 170 GHz
由于该系统十分繁琐、而且使用不便。终于被一个以实际波长划分的波分波段系统取代,这两个系统的换算如下。
原 P波段 = 现 A/B 波段
原 L波段 = 现 C/D 波段
原 S波段 = 现 E/F 波段
原 C波段 = 现 G/H 波段
原 X波段 = 现 I/J 波段
原 K波段 = 现 K 波段
雷达波段代表的是发射的电磁波频率(波长)范围,非相控阵单雷达条件下,高频(短波长)的波段一般定位更准确,但作用范围短;低频(长波)的波段作用范围远,发现目标距离大。
S波段雷达一般作为中距离的警戒雷达和跟踪雷达。
X波段雷达一般作为短距离的火控雷达。
来源:https://blog.csdn.net/Gou_Hailong/article/details/114849937