什么是PDR(步行者航位推算)?
内容纲要
PDR的应用基础是基于RSSI的室内定位,进行室内导航与航迹规划。
惯性导航是一种不借助外力(接收本体之外的信号)的自主性导航,你只要知道自己的初始位置,知道自己的初始朝向,知道自己每一时刻如何改变了朝向,知道自己每一时刻相对朝向是怎样走的,这样就能得到每时每刻自己的位置。
步行者航位推算(Pedestrian Dead Reckoning,PDR)是对步行者行走的步数、步长、方向进行测量和统计,推算出步行者行走轨迹,和位置等信息。
主要是在无信标环境下使用惯性测量单元(Inertial Measurement Unit,IMU)感知人员在行进过程中的加速度、角速度、磁力和压力等数据,并利用这些数据对行进人员进行步长与方向的推算,从而达到对人员进行定位跟踪的目的,其中主要涉及的过程有步态检测、步长和方向计算。PDR原理图如下:
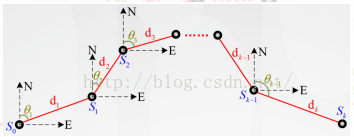
PDR初始条件:已知初始位置S0(N0,E0)
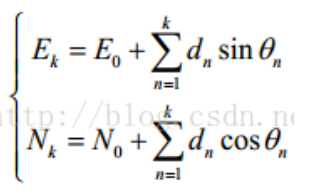
根据推算公式,可以得出任意时刻k的位置Sk(Nk,Ek)。
其中:关键的信息是步长计算和方向估计。
因此:PDR进行室内定位的难点在于:由IMU采集的加速度、角速度和磁力等数据精确推算出人员运动的步长和方向。