引言:提到智能驾驶,就离不开它必要功能需求——高精度定位,其中实时动态定位RTK(Real-Time Kinematic)是高精度卫星导航定位中应用最为广泛、最具代表性的技术,身为北斗国家队的千寻位置,基于RTK技术承建和运营了地基增强系统“全国一张网”,颇受广大海内外用户好评。然而近来,PPP-RTK的概念甚嚣尘上,听说其表现颇为亮眼,业内人士免不了要将RTK与PPP-RTK进行一番比较,既已有了便宜大碗的RTK,为何还要打造出一个PPP-RTK?想解开这个既生瑜何生亮的问题,让我们从GNSS高精定位发展史讲起…
自上世纪八十年代GPS静态长基线解算开始,高精度GNSS数据处理发展至今已三十余年。随着实时GNSS高精度导航定位服务的普及,近年来PPP-RTK受到了国内外研究学者以及导航从业者的极大关注。
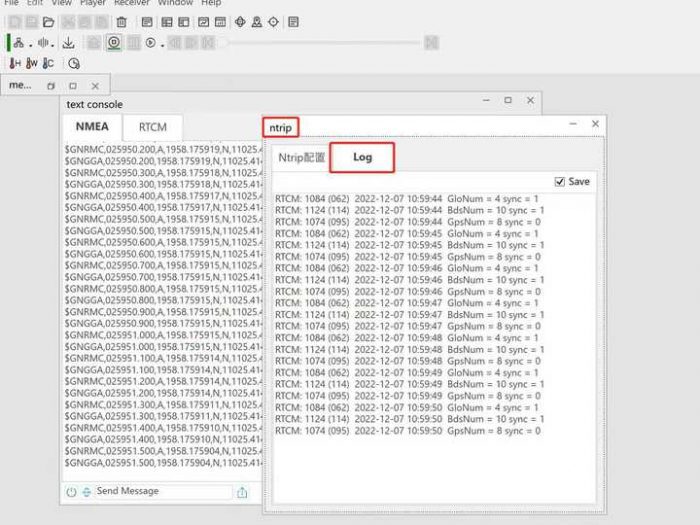
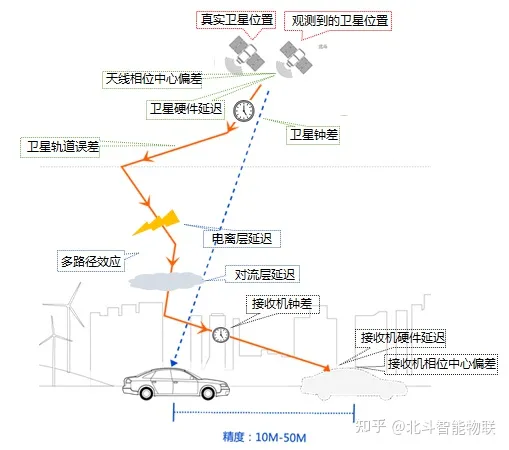
GPS的定位误差通常大约10米,10米级别的误差显然无法满足现代社会的定位需求,那么有没有一种办法可以减小这种定位误差呢?显然是有的,就是接下来要用到的RTK技术。在嵌入式应用当中如何快速方便的使用RTK技术呢?
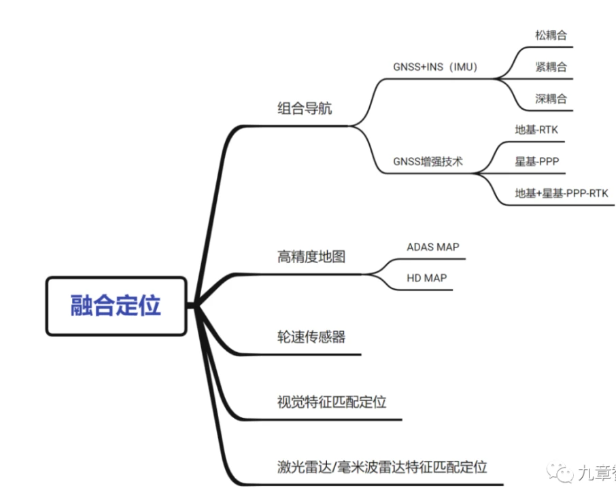
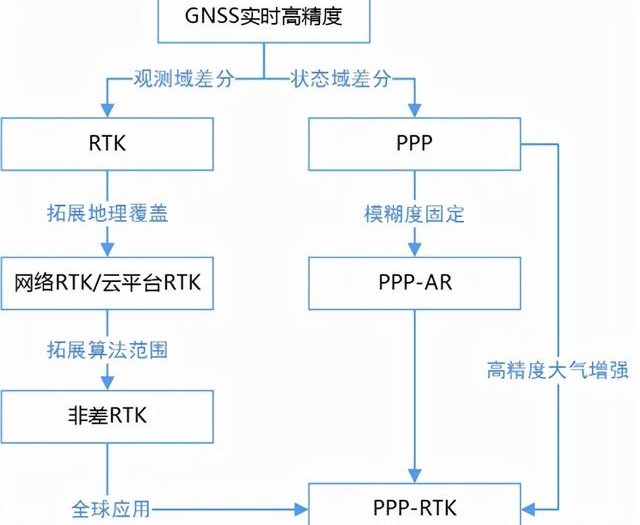
卫星定位早期是军用技术,随后对民用进行了开放。随着时间的推移,载波相位差分技术(RTK)和精密单点定位技术(PPP),成为高精度卫星导航定位中应用最为广泛、也最具有代表性的两种技术路线。
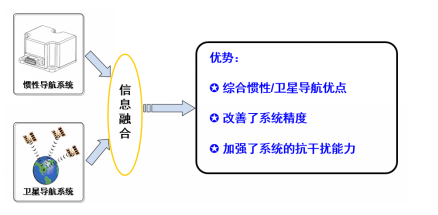
两者主要区别就是基站定位技术不同。首先用通俗的话来说,RTK是先架设一个基站,基站把自己的误差是多少告诉我,我再用这个误差项去消除自己移动站的误差。而PPP不用我们自己架设基站,已经有一些基础的基站,通过卫星发送的数据,把误差分离处理后告知了卫星,卫星做了误差的消除后再给我们定位信息。
互联网地图是以互联网为传播介质的一种新型的数字地图,与传统纸质地图有很大的区别。由于传统观念根深蒂固,制图专业人士常常用纸质地图的思维方式来判断设计互联网地图,结果往往得不到用户的认同。在总结多年互联网地图运作的经验教训后,作者认真分析了互联网地图与纸质地图的不同,转变了观念,并由此带来认识上的创新。